In our annoucement article about the EggBot Electro-Kistka — the hot wax dispenser for the EggBot — we noted that it can be challenging to reposition an egg after taking it out to dye the egg between wax layers.
As an alternative suggestion, reader Dan commented:
Could you leave the egg in the EggBot and paint on the first layer(s) of dye with a brush? Then dip the egg for the last layer to get the ends covered.
In looking around for examples of great open source hardware projects, we came across an unexpected number of projects and products labeled as open source hardware that, upon closer inspection, actually turn out not to meet the definition. Often, they’re using an inappropriate license— typically a “non-commercial license,” which is not only unenforceable but explicitly incompatible with open source values. Sometimes, they haven’t released the design files. Sometimes, a person has apparently misused the term “open source” to mean “closed and proprietary.” And sometimes you might see the open hardware logo used without any substance to back it up.
But what (if anything) can or should be done about it? We’d like to solicit your input as to the best ways to approach this problem. Perhaps there are not any easy answers.
As a baseline, we think that it’s important to address the problem, and to do so earlier rather than later. To mislabel a product for sale as open source hardware may constitute false advertising, illegal in the US under state and federal law. In noncommercial projects where nothing is for sale, misusing the terms may help to set precedent that can damage the community’s understanding of open source. For instance, if enough people see non-commercial licenses on things labeled as be open source, they may assume that it is acceptable.
If you happen to know someone behind the project, you might consider contacting them directly to start a dialog about what it means for something to be “open source.” Or, you could (hint hint hint) send them a link to this article, letting them know that you found it interesting!
But, what if you don’t have any personal connections to the people involved? It’s certainly not as easy. Sometimes you can initiate a dialog with a company, perhaps by asking about their design files or licenses. At the other end of the spectrum, people sometimes bring up options like public shaming. In our view, shaming is harmful to the open source community, and should be considered a last resort akin to violence. Rather, we as a community need to work towards positive ways to nudge people toward doing the right thing.
Please let us know what you think: what should you do when you come across a project mislabeled as open source hardware?
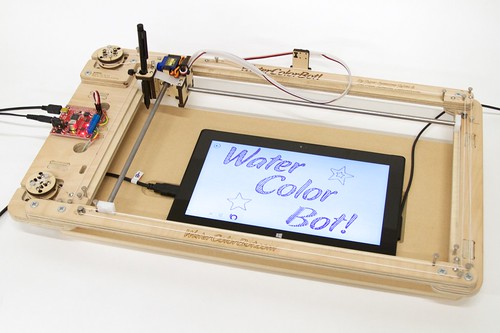
About a year ago, I started working on a project that used robotics to control a Surface Pro tablet. Not long after I started, I got my first glimpse at the the WaterColorBot on display at Maker Faire Bay Area 2013. The WaterColorBot is designed to carry a paintbrush over a piece of paper, raising and lowering it as needed to paint a picture. The movement and software control is similar to CNC router with special design modifications to make it lighter, cheaper and easier to control. A CNC router has to move heavyweight cutting bit with friction so needs expensive motors, rails, and belts. The WaterColorBot, on the other hand, needs only to move a paintbrush in a low friction environment.
I was instantly sold on the idea of using a WaterColorBot to control the Surface. I backed the Kickstarter, waited for my bot to arrive, and started working on software. When the WaterColorBot arrived, I was not disappointed. The assembly was quick and I was robotically painting in no time.
With the big mechanical and electronic solutions solved, my attention turned to the tablet. The Surface Pro is rare among tablets in that it uses a digitizer that allows extremely precise tracking with a stylus along with “hover” and “right-click” functionality. It does not need to be electrically grounded like a stylus for a screen that only supports capacitive touch. I was certain that the Surface Pro was the way to go, but not quite how it was going to be held together. The project was about to take a another serendipitous turn.
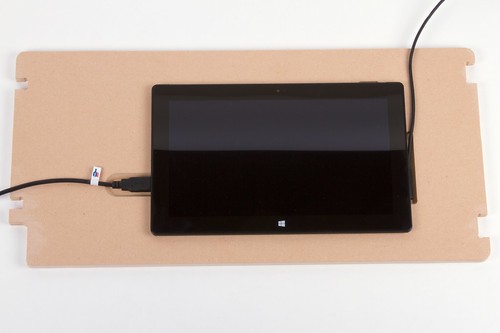
The custom-cut spoilboard
At this point, I shared my enthusiasm with Windell and Lenore of Evil Mad Scientist and they gave me a unique offer: Stop by the Evil Mad Scientist shop and together we would make a custom cut spoilboard (lower deck) fitted to mount the Surface Pro 2. Wielding digital calipers and other measurement and software tools, Windell came up with a design that held the tablet firmly and had extra space cut out for the charger, power button, and USB cable.
The area beneath the tablet has a lip and a lower recessed area. This design reduces wobble and makes it look even better. On the topic of machining – I got a few lessons in how larger CNC machines work. Windell showed me some design considerations in software and gave me a safety briefing about the CNC router itself. This thing can cut fast.
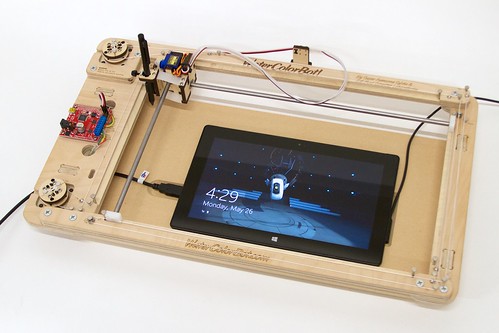
After a little sanding, we fitted the tablet, spoilboard, and WaterColorBot together. Having the co-creators of the WaterColorBot with me on this journey was priceless, as we can see from the final assembly. The first spoilboard we cut matched perfectly and the tablet is held firmly in place.
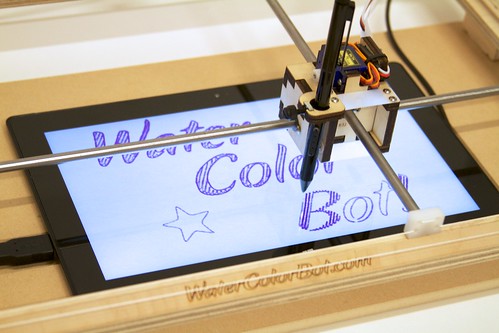
With enthusiasm fueled by seeing it all fit together, we decided to tell the WaterColorBot to do some painting. Windell loaded up an example sketch in Inkscape and, with only a minute to calibrate the stylus height, we were drawing!
The software running on the Surface Pro is called FreshPaint and we chose a simple marker tool. In the video, you’ll hear a laughter break where the Surface picked up the floating toolbar in the app and dragged it around the screen.
Given a little time, we could have taught the WaterColorBot to change brushes and colors in FreshPaint, but our goals for the day were met. The light weight and low friction of the Surface stylus is perfectly matched for use on the WaterColorBot. A custom fitted spoilboard means the Surface will always be at the exact same place on the X/Y plane, greatly simplifying future software development. Next project: Teaching the robot how to see!
(Full disclosure: My day job is Systems Operations with Yammer, a Microsoft company. This project and use of the Surface Pro 2 is not affiliated with Microsoft in any way nor did they influence the project with sponsorship or exercise any editorial control. If they had, I’d try to talk them into contributing a Surface Pro 3! “Surface” is a trademark of Microsoft Corporation.)
We can’t say how many times we’ve heard people ask questions about hacking or building their own sprinkler controllers, but apparently here are the ones that everyone has been looking for. These open source hardware sprinkler controllers from Ray’s Hobby — designed so that you can hack and build your own — look well-made and genuinely useful. There are neat irrigation (and multipurpose relay) controls, including Arduino-flavored variants as well as versions for Raspberry Pi and BeagleBone lovers.
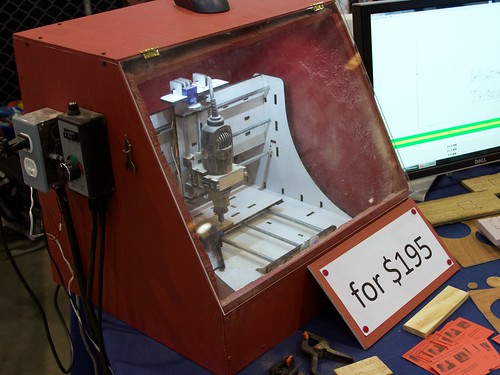
Let’s file this under “intro machines.” The Makesmith CNC, currently available on Kickstarter for just $195 including everything but the Dremel tool. It makes very clever use of appropriate technology: Three tiny hobby servo motors, modified for continuous rotation, turn gears that turn the lead screws (well, all-thread) to drive the XYZ stage. An magnetic encoder monitors the rotation, making a high-resolution, closed-loop control system. No bushings, melamine-coated MDF parts, Arduino control. Planned for future open source hardware+software release, too.
Perfect? Nope, but the creators of the project seem to be keenly aware of its abilities and limitations (many discussed here), and oh does it have affordability on its side.
Over at OSHWA.org (of which I am a board member), there’s a blog post about different Creative Commons license choices, and their implications for open source projects:
The reason is that there is not a single entity called the “Creative Commons license.” Rather, Creative Commons offers a number of different licenses that can apply some rights and protections to your work, including the CC-BY and CC-BY-SA licenses which reflect open source values closely. […]
Creative Commons also offers licenses that carry restrictions — against commercial use and/or derivative works — that are strictly incompatible with open source. The open source hardware definition states that a license for open source hardware “[…] shall allow for the manufacture, sale, distribution, and use of products created from the design files, the design files themselves, and derivatives thereof.” Thus, if you choose to release hardware under the banner of “open source,” that means that you agree to allow others to use your design commercially, as well as to create derivative works (and to use them commercially). Consequently, you cannot advertise your project or product as “open source” if it carries restrictions against either of those uses.
EE Times came by and interviewed Windell in advance of his upcoming Maker Faire talk about best practices for Open Source Hardware.
…Big semiconductor companies are jumping on the bandwagon of open source reference boards. But their chips’ intellectual property remains carefully guarded corporate crown jewels. …
The Open Hardware Summit is the annual conference organized by the Open Source Hardware Association and the world’s first comprehensive conference on open hardware; a venue to discuss and draw attention to the rapidly growing Open Source Hardware movement. Speakers include world renowned leaders from industry, academia, and the maker community. Talks cover a wide range of subjects from electronics and mechanics to related fields such as digital fabrication, fashion technology, self-quantification devices, and DIY bio. Workshops focus on, but are not limited to, education, manufacturing, design, business, and law.
The call is on a short schedule this year: Submissions are due by 25th of May 2014.
I was initially taping an index card onto the print platform for testing purposes, but when I saw this Boogie Board at a toy store, it seemed like a perfect choice to be used as the writing surface. One can draw/write anything on it, and erase with a press of a button. Of course, it can still be removed and any other suitable surface can be taped or mounted on the print platform, as necessary.